
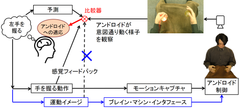
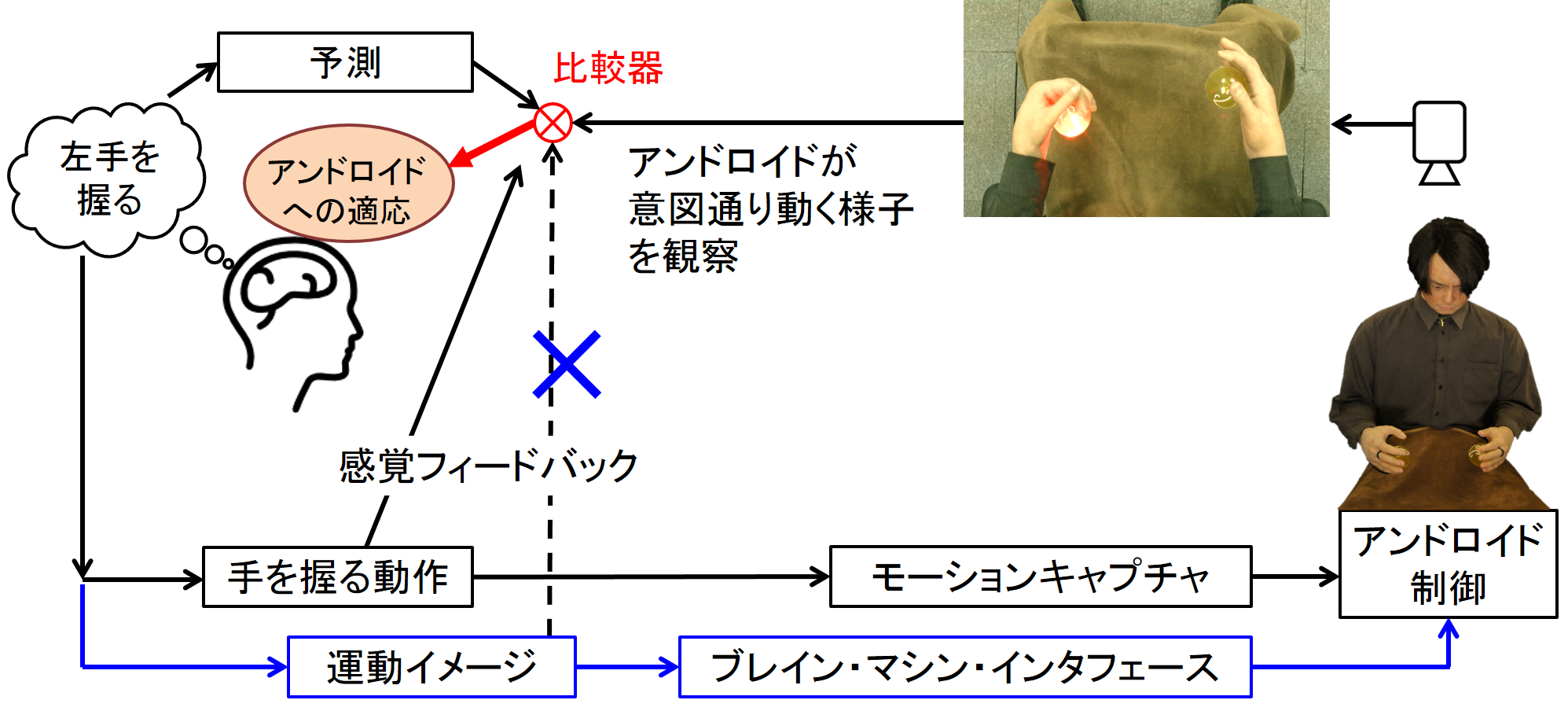
図1:実験の構成
本研究成果は、2016年9月22日午前10時(英国時間)発行の英国科学誌「Scientific Reports」に掲載されました。
頭の中で思うだけで機器を操作できるブレイン・マシン・インタフェース(以下、BMI)(注1)には多くの期待が寄せられていますが、現状の技術では性能が限定されており、体で操作する方法と比べて、健常者にとっての優位性が明らかではありませんでした。
今回、本研究グループはアンドロイド・ロボット(以下、アンドロイド)(注2)をBMIを介して脳により操作した場合と、体により操作した場合の反応を比べる実験を行い、脳により操作した方が、アンドロイドに対しより強く適応できることを実証しました。
【ポイント】
(1) 現状のBMIを介した脳による操作は、リモコンや体による操作と比べて遅延が大きく、性能も限定されていることから、健常者への応用は困難でした。
(2) 今回、アンドロイドを脳によって操作すると、体で操作した場合と比べ、アンドロイドへの適応力が高くなる(アンドロイドとの一体感が高まる)ことがわかりました。
(3) 本研究の知見はアンドロイドに限らず、多様な機器の遠隔操作で効果があると考えられます。またBMI性能の向上や、脳による操作のメリットを活かした新しい応用分野の開拓に寄与することが期待されます。
【研究の背景と経緯】
ImPACT山川プログラム・マネージャーの研究開発プログラムでは、脳の健康に関するサイエンスとビジネスのインタラクションにより、世界に先駆けた新産業創出を目指しており、その一環としてアンドロイドが人の脳に及ぼす効果の検証と、この効果を用いて人の脳を効率的に制御する方法を探索してきました。
これまでの研究から、BMIを介してアンドロイドを操作する際、フィードバックの与え方を工夫することで、操作者の脳活動パターンをBMIの性能を引き上げる方向に変化させられること(参考文献1)がわかっています。
本研究開発プログラムではさらに研究を進め、この効果が通常のロボットよりもアンドロイドを操作した場合に長く続くこと(参考文献2)など、アンドロイドをBMIで操作することで、人に強い作用を及ぼしうることがわかってきました。しかし現状の技術ではBMIは性能が限定され、操作遅延も大きいため、リモコンや体を動かして操作する代替手段と比べた場合、特に健常者にとってはBMIを使うメリットが明確ではありませんでした。
【研究の内容】
今回、本研究グループはアンドロイドを対象として、脳波によるBMIで操作した場合と、体により操作した場合とで比較する実験を行いました(実験参加者33名)。この際、体による操作にはモーションキャプチャ装置を用いて、操作者の体の動きにあわせてアンドロイドが動くようにしています。
一定時間の操作を行った後、アンドロイドをどの程度自分の体と感じたかを主観評価(アンケート)によって問うとともに、客観評価としてアンドロイドへ刺激を加えた時の皮膚コンダクタンス反応(注3)を測定しました。
【研究結果】
実験の結果、主観評価、客観評価のいずれでも、体により操作した場合と比べ、BMIを介して脳により操作した場合に、アンドロイドをより強く自分の体として感じられることがわかりました。
BMI、特に今回のように脳波を用いるBMIでは、操作者の意図を識別するための脳波データを蓄積するために、動きを想像してから実際にアンドロイドが動くまでに遅延が生じます。今回の実験では体による操作と比べて、BMIを介した脳による操作では0.5秒程度の遅延が生じています。このような遅延がある場合、一般に操作感は失われ、また操作対象との一体感も阻害されます。
このような遅延があるにもかかわらず、低遅延のモーションキャプチャによる操作よりもアンドロイドとの一体感が強く感じられた理由は、今回の実験だけからでは明確ではありませんが、BMIを介した脳による操作時には、運動を意図するだけで実際には体が動いていないことが良い方向に働いたと考えられます。すなわち、体による操作では自分本来の体が動き、姿勢の変化などが感じられますが、その姿勢変化とロボットの動きとの間でギャップが生じるため、一体感が損なわれるのに対し、姿勢変化を必要としないBMIを介した脳による操作では遅延が大きくともギャップが生じず、意図通りにロボットが動く様子を見ることで強い一体感が生じたと考えられます。
【今後の展開】
アンドロイドとの一体感の向上とBMIによる操作性能との間には相関があることから(参考文献1)、一体感を向上させることでBMIの操作性能をより向上させるなど、人の脳の制御性を高められる可能性があります。この脳の制御性の向上は、アンドロイドに限らず、多様な機器の遠隔操作で効果があると考えられます。将来、よりロボットの体を自由に操作できるインターフェースを実現できれば、映画のようにロボットを自分の分身として使う世界が実現される可能性もあります。
また高齢になり、老化の作用で体が思うように動かないといった心身にギャップのある状態においても、BMIで思い通りの動作ができることで脳の活性化・健康維持に寄与するといった応用も考えられます。今後、アンドロイドからのフィードバックの性質と、これを効果的に強化する手法の探索をさらに進めることで、脳の制御性を高める手法の開発と応用に向けた研究を進めていきます。
【参考図】
https://www.atpress.ne.jp/releases/112430/img_112430_1.png
【用語解説】
(注1)ブレイン・マシン・インタフェース(BMI:Brain Machine Interface)
一般に脳の活動状態を読み取ったり、脳へ刺激を加えることで機械システムとの情報伝達や制御を仲介する装置を指します。ここでは、脳波を計測して操作者が意図する運動を推定し、アンドロイドに対して動作指令を送る装置を指します。
(注2)アンドロイド・ロボット
人に酷似した外観を有するロボット。
(注3)皮膚コンダクタンス反応
皮膚の電気の流れやすさ(コンダクタンス=直流では抵抗の逆数)が発汗などの皮膚の湿気により変化する反応で、体への刺激やストレス、感情状態の変化などによって上昇すると言われています。これまでの関連研究から、自分の体以外の物体を自らの一部と感じていると、対象物体への刺激が加えられた際に皮膚コンダクタンス反応が見られることがわかっています(参考文献3)。
【参考文献】
(1) Alimardani, M., Nishio, S. & Ishiguro, H. Effect of biased feedback on motor imagery learning in BCI-teleoperation system. Front.Syst. Neurosci. 8 (2014).
(2) Alimardani, M., Nishio, S. & Ishiguro, H. The Importance of Visual Feedback Design in BCIs;from Embodiment to Motor Imagery Learning. PLoS ONE (2016).
(3) Armel, K. C. & Ramachandran, V. S. Projecting sensations to external objects: evidence from skin conductance response. Proc. R. Soc. Lond., B: Biol. Sci. 270(1523), 1499-1506 (2003).
【論文情報】
Maryam Alimardani, Shuichi Nishio & Hiroshi Ishiguro:
Removal of proprioception by BCI raises a stronger body ownership illusion in control of a humanlike robot
(BMIによって体性感覚を除去することで、人に似たロボットを操作する際により強い身体所有感が生じる)
【研究グループ】
株式会社国際電気通信基礎技術研究所(ATR)
マリヤム アリマルダニ(東京大学併任)、西尾 修一/石黒 浩(大阪大学併任)
【謝辞】
研究参画者の一部は、以下の研究資金からの支援も部分的に受けています。
・日本学術振興会/科学研究費補助金 25220004
・日本学術振興会/特別研究員奨励費 15F15046

{kind=link}