
海外メディアRoadtoVRは、2017年4月24日の記事において、予測トラッキングに関する考察を行った。
そもそも「予測トラッキング」って何?
VR・ARテクノロジーを語る文脈において「予測トラッキング」という言葉は、ある未来の時点におけるユーザーの頭や腕を含めたカラダの位置を予測することを指している。
なぜユーザーのカラダの位置を予測することが必要になるかと言えば、ユーザーのカラダの位置が予測できれば、その予測に基づいてバーチャル空間におけるユーザーの挙動に応じて早くデータ処理できるからだ。
こうした予測トラッキングのメリットを、具体的にVRとARの使用例に沿って見ていこう。
VRに横たわるリアルとバーチャルの溝
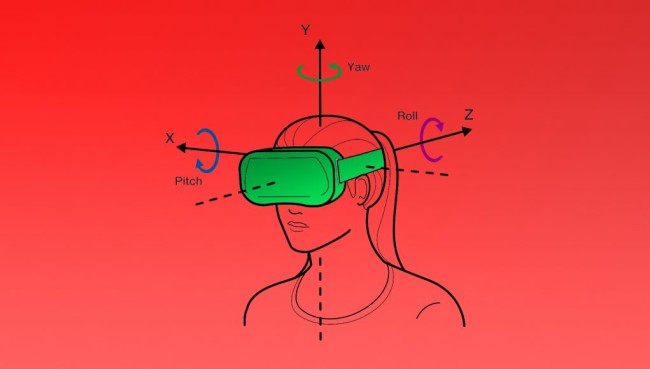
周知の通り、VRヘッドセットを装着して見えるバーチャルな光景は、VRヘッドセットの種類に関係なくユーザーの頭の動きや手の動き、ルームスケール対応がなされている状態ではユーザーのカラダの位置に連動してデジタル情報として描画されている。
この描画処理には、当然ながら時間が必要とされる。この描画処理に要する時間が大きいと、ユーザーのリアルな動きとバーチャルな光景の連動が損なわれ、VR体験に特有な「没入感」が削がれることになる。
仮にユーザーの動きを予測できたとしたら、ユーザーの動きに先回りして、バーチャルな光景を前もって描画できるのはなかろうか。つまり、先回りして描画するため、描画処理に時間がかかったとしても予測により時間を節約しているので、ユーザーを「待たす」ことなく期待するバーチャルな光景を見せることができるのではなかろうか。
ARに求められるリアルとバーチャルの一致
AR体験の場合、ARオブジェクトはリアル・オブジェクトとオーバーレイ表示されることが多い。
ARオブジェクトをリアル・オブジェクトに対してオーバーレイ表示するには、リアル・オブジェクトの位置を測定することが求められる。家具のような静止したオブジェクトの位置は、一度の測定でAR体験を成立させるのに事足りる。
問題は、動くリアル・オブジェクトに対するAR処理である。動くオブジェクトに対してAR処理を実行するには、リアル・オブジェクトをトラッキングする必要がある。そして、トラッキング情報にもとづいてAR処理を実行すると、当然ながら「処理時間」が発生する。
トラッキングが求められる結果、ARでもVRと同様に「処理時間」に先んじたデータ処理を可能とする「予測トラッキング」が重要となるのがわかるだろう。
まとめると、「予測トラッキング」とはVR・AR体験について回るデータ処理による「遅延時間=レイテンシー」を予測処理によって相殺することを目指す技術なのだ。
予測の難しさ
しかしながら、動いているモノの未来における位置を予測するのは難しい。
もっとも単純な予測の例として、走っているクルマの1秒後の位置を考えてみよう。この予測例は、信号機のない横断歩道を渡る時に、日々行っていることだ。
クルマの動きから、おおよその速度は推測できる。そして、速度が分かれば、1秒後の位置もだいたい予測できる。ここで予測精度を上げようと思うと、速度と時間の計測が必要となる。
スピードガンとストップウォッチがあれば、速度と時間の計測は可能だ。これでかなり正確な予測ができるかのように思われる。
しかし、実際にはそうはいかない。リアルな世界には加速度や測定誤差という予測を複雑にする厄介なパラメーターが存在するのだ。日常生活でクルマとぶつからずに横断歩道を渡れるのは、予測精度が高くなくても安全を確保できるからに過ぎない。
単純な例を考えただけでも、予測が難しいことがわかった。クルマの例でさえ難しいのだから、バーチャルな体験を高い精度で構築することを目指すVR・ARはもっと難しいことは「簡単に」予測できるだろう。
レイテンシーが発生する諸原因
それでは、そもそも「予測トラッキング」によって回避しようとしているレイテンシーが生まれる原因はどこにあるのだろうか。以下にレイテンシーの原因を列挙する。
センサー
センサーに使われる技術が赤外線であれ、ジャイロスコープであれセンサーが位置情報を取得するには時間を要する。
データ成形
取得した位置情報が後の処理で利用されるようにするために、データを処理する時間が発生する。
ノイズの除去
取得した位置情報をすべて利用するわけではない。データに混入したノイズを除去するための処理時間が発生する。
データ転送
センサーで取得したデータを描画処理ユニットに転送する時に、転送時間が発生する。
描画処理
位置情報に対応した画像を生成する時に、画像処理時間が発生する。
フレームレート
ディスプレイへの描画処理は、フレームレートと呼ばれる仕組みで実行される。通常は1秒間に60回描画処理を実行している。裏を返すと、描画はつねに60分の1秒の遅延時間が発生しているのだ。
以上のようなレイテンシーの諸原因は、単独ではほんのわずかな時間だが、積み重なると時に体感できるほどの「遅れ」となる。そして、この諸原因のどれもが、VR・AR体験を成立させるのは不可欠なものなのだ。
予測トラッキングに活用されるアルゴリズム
レイテンシーを相殺することが期待される予測トラッキングには、どのような予測アルゴリズムを活用することができるだろうか。以下に代表的なアルゴリズムを紹介する。
静的予測
静的予測とは、予測対象の位置、速度、時間のみを測定して予測するアルゴリズムだ。本記事で先に挙げたクルマの位置を予測する例は、この静的予測が使われている。
静的予測は、直観的にわかりやすいので実装も簡単である。しかし、リアルな世界は、静的予測で事足りるほど簡単ではない。
静的予測は予測精度があまり要求されていない時、あるい予測処理の負荷を小さくしたい時といった限られたケースだけでしか使われない。
カルマンフィルター
カルマンフィルターは、現在よく使われている予測アルゴリズムである。実際にカーナビに使われていて、かつてはNASAのアポロ計画においてロケットの軌道計算に応用された。
カルマンフィルターの処理は複雑な計算式から構成されているのだが、リアルな世界で生じる測定誤差にも対応している。
アルファ・ベータ・ガンマ法
アルファ・ベータ・ガンマ法は、あまり有名ではないがカルマンフィルターより簡単なアルゴリズムだ。その仕組みは、予測精度を上げるために、静的予測にさらにパラメーターを追加するというものである。追加されるパラメーターには、加速度が使われることが多い。
アルファ・ベータ・ガンマ法は、言ってみれば静的予測の改良版だ。
以上のような予測トラッキングは、今後ますますその必要性が認識されると思われる。というのも、VR・AR体験における処理データ量は増える傾向にあり、レイテンシーの回避がより切実な問題となることが予想されるからだ。
もしかしたら、そう遠くない将来においてVRヘッドセットのスペックを喧伝する文言に「◯秒先まで描画処理できる」というようなものが現れるかも知れない。
予測トラッキングに関する考察を行ったRoadtoVRの記事
http://www.roadtovr.com/understanding-predictive-tracking-important-arvr-headsets/
Copyright ©2017 VR Inside All Rights Reserved.
