
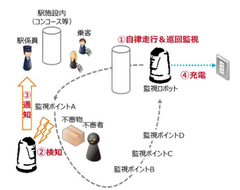
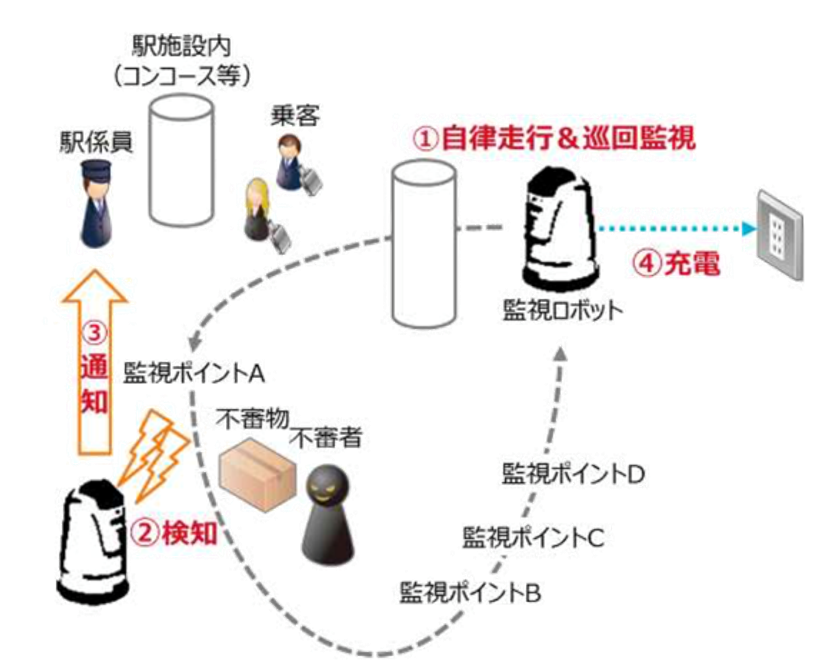
本実証実験のイメージ

自律移動型ロボットLibra(リブラ)イメージ。※共同研究開発中に、デザイン・機能・安全性を検討の上、適切な仕様に変更します。
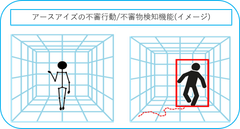
アースアイズの不審行動・不審物検知機能(イメージ)

自律移動型ロボットLibra(リブラ)をベースに日本ユニシスが開発したロボットSiriusbot(シリウスボット)
画像1: https://www.atpress.ne.jp/releases/146356/LL_img_146356_1.png
本実証実験のイメージ
(注)平成29年度ロボット産業活性化事業「公募型共同研究開発事業」について
都産技研が提示した、警備ロボット・運搬ロボットの2分野を対象として、「ロボットの導りや、人物のふらつきや座り込みなど、2D(光学)カメラでは把握できなかった人物の細かい動作を検知でき、対象物との距離が計測できるため、人物が重なっていても個々の認識が可能です。
■概要
2020年開催の東京一大イベントにおいて、安全性向上や従業員の監視業務負荷軽減のニーズの高まりを受け、首都圏の駅においての定点監視カメラの死角をメインに、ロボットが警備・監視するシステムの開発に着手。アースアイズの不審者、異状者、不審物を検知するAI機能を、都産技研が試作開発中の自律移動型ロボットLibra(リブラ)をベースに、Taurus(トーラス)※の防水・防塵・踏破能力を組み合わせて自律走行しながら不審者/不審物などを検知、通報する仕組みを実現したロボットを開発・運用します。
※ Taurus(トーラス)とは、都産技研の同じ屋外での利用を目指す試作ロボットです。
■背景
・2020年に東京で開催の一大イベントに向け、旅客インバウンド急増に伴い、安全性維持/向上の必要性(※西武鉄道の一部駅構内は、競技会場へのアクセス経路となる可能性が高く、今後警備の必要性がさらに高まると推測)
・警備員人材確保難(労働力人口減少)の対策
■警備ロボットに搭載するカメラの中核技術(アースアイズ提供)について
●アースアイズの不審物/不審行動検知
3Dで集積された膨大なデータから不審物や不審行動のみを抽出し、効率よくデータ処理をすることにより、事件や事故が起こる前に、それらを未然に防ぐことを目的に開発されたアースアイズ独自のAI機能です。
●空間をグリッド化
警備ロボットに搭載するカメラは、3Dセンサーで距離(奥行き)を測定することで、ミリ単位で空間のグリッド化が可能。これにより、人物の位置を緯度経度で把握し、荷物の置き去りや、人物のふらつきや座り込みなど、2D(光学)カメラでは把握できなかった人物の細かい動作を検知でき、対象物との距離が計測できるため、人物が重なっていても個々の認識が可能です。
■アースアイズについて
社名 : アースアイズ株式会社
本社所在地: 東京都中央区築地1-12-22 コンワビル5階
資本金 : 117,500,000円
■東京都立産業技術研究センターについて
正式名称 : 地方独立行政法人東京都立産業技術研究センター(略称:都産技研)
本部所在地: 東京都江東区青梅2-4-10
組織形態 : 地方独立行政法人
事業内容 : 産業技術に関する試験、研究、普及、および技術支援を
行うことにより、都内の中小企業の振興を促進。
公式サイト: https://www.iri-tokyo.jp/
■西武鉄道について
社名 : 西武鉄道株式会社
本社所在地: 埼玉県所沢市くすのき台1-11-1
事業内容 : 鉄道事業・沿線観光事業・不動産事業
公式サイト: https://www.seiburailway.jp/
■日本ユニシスについて
社名 : 日本ユニシス株式会社
本社所在地: 東京都江東区豊洲1-1-1
事業内容 : クラウドやアウトソーシングなどのサービスビジネス、
コンピューターシステムやネットワークシステムの
販売・賃貸、ソフトウェアの開発・販売および
各種システムサービス
公式サイト: https://www.unisys.co.jp/

{kind=link}