
JAXA(宇宙航空研究開発機構)は25日、昨年9月に打ち上げられた無人探査機「SLIM」が日本初となる月面着陸に成功したと発表しました。
さらにSLIMに搭載されていた超小型の月面探査ロボ「LEV-2(通称:SORA-Q)」が月面に着陸したSLIMの撮影にも成功し、その画像を地球に送り届けてくれています。
SORA-Qの開発にはJAXA、ソニーグループ株式会社、同志社大学の他、おもちゃメーカーのタカラトミーが参加しました。
また、SORA-Qのような完全自律ロボットによる月面探査は世界初の快挙とのことです。
目次
- ピンポイント着陸に成功も、着地時に横転
- タカラトミーが開発に参加した超小型ロボ「SORA-Q」
ピンポイント着陸に成功も、着地時に横転
本プロジェクトの目的は、月面の目標着地点にピンポイントで着陸することと、月面の低重力環境下における超小型ロボットの探査技術を実証することでした。
まず第一のピンポイント着陸は、小型月着陸実証機「SLIM(Smart Lander for Investigating Moon)」の仕事です。
SLIMは「月の狙った場所へのピンポイント着陸」「着陸に必要な装置の軽量化」「月の起源を探る」といった目的を実証するために開発されました。
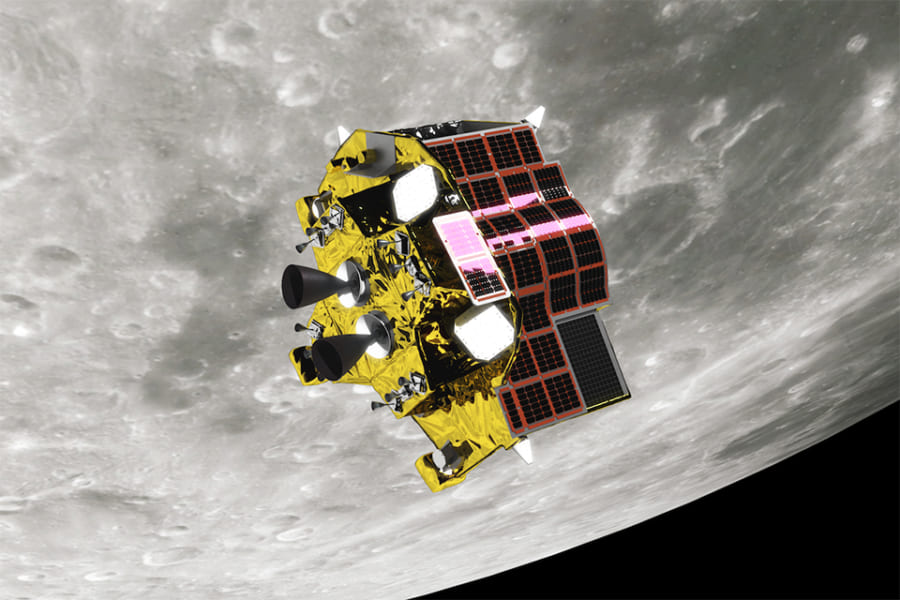
SLIMは昨年9月に鹿児島県の種子島宇宙センターから打ち上げられ、およそ4カ月半をかけて月面に到着しました。
そして2024年1月20日0時20分に月面への軟着陸に成功しています。
SLIMプロジェクトチームの報告によると、当初は目標着地点から半径100メートル以内を目指していましたが、実際は目標着地点からわずか55メートル東の地点に着陸できたとのことです。
また高度50メートル付近までは誤差約3〜4メートルと、ほぼ完璧な状態だったという。
しかし2つのエンジンのうちの1つが何らかの理由で脱落したため、横方向の推力で50メートルほど離れてしまったと説明されています。
それでもチームは「予想を上回る高い精度でピンポイント着陸できたことで、今後は狙った複雑な地形に着陸することも可能になる」と期待をのぞかせました。
ただし、SLIMは着陸時に頭からひっくり返ってしまったようで、太陽電池パネルが太陽の方向を向いておらず、現在は発電できない状態にあるといいます。
SORA-Qによって撮影されたその貴重な画像がこちらです。

タカラトミーが開発に参加した超小型ロボ「SORA-Q」
第2の目的である超小型ロボットによる月面探査技術の実証は「SORA-Q」によって叶えられました。
SORA-Qは正式名称を「変形型月面ロボット(Lunar Excursion Vehicle 2:LEV-2)」といい、日本を代表するおもちゃメーカー・タカラトミーが開発に参加し、玩具開発で培ってきた小型化と軽量化の技術が総動員されています。
通常時のSORA-Qは直径約8センチ、重さ約250グラムの野球ボールと同サイズの球体ですが、月面に放出されると、球体が左右に展開し、尻尾のようなスタビライザーを伸ばして、車輪のように回転しながら移動します。
加えて、2台のカメラが前後に搭載されており、進行方向と後ろ方向の両方を撮影することが可能です。

今回のミッションでは、SLIMが着陸直前でメインエンジンを停止して自然落下するタイミングでSORA-Qが月面へと放出されました。
またその際に、SORA-Qの撮影した画像を通信機を介して地球に転送する役目を果たす「超小型月面探査ローバ:LEV-1」も一緒に放出されています。
結果、先のSLIMの横転画像が得られたことから、SORA-Qの自動展開と撮影およびLEV-1の通信機能が正常に動作したことが確認できました。
この一枚の画像は日本の宇宙開発研究チームがとてつもない快挙を達成したことを証明します。
第一に、SORA-Qは日本初となる月面探査ロボットとなりました(世界では5カ国目)。
第二に、SORA-Qのような完全自律ロボットによる月面探査は世界初です。
それから第三に、複数ロボットによる同時月面探査も世界初の偉業となりました。
この成果について、SLIMプロジェクトチームの坂井真一郎プロジェクトマネージャーは会見で「自分たちの作った物が本当に月面に行き、SORA-Qが画像を撮ってくれたと思うと、あの画を見た瞬間は腰が抜けそうになりました。そのぐらいのインパクトを受けました」と話しています。
またタカラトミーの代表取締役会長である富山幹太郎氏は次のようにコメントしました。
「SORA-Qプロジェクトの成功が、世界中の子どもたちが自然科学に対する興味や関心を持つきっかけになることを願うと同時に、難しい事や新しい事に挑戦していく事の大切さと、夢と希望を与え自分自身の未来を創り出す力を信じるきっかけとなることを期待しています。
創業100周年を迎えるこの記念の年に、生業である“おもちゃ”の技術が今回の偉業の一翼を担えたことを誇りとし、私たちはこれからも『アソビ発』の新たな挑戦を続けてまいります」
これから日本の誇るおもちゃ技術が、人類の宇宙開発を大きく進展させるかもしれません。
こちらはSORA-Qの詳しい説明動画です。
参考文献
変形型月面ロボットによる小型月着陸実証機(SLIM)の撮影およびデータ送信に成功
https://www.jaxa.jp/press/2024/01/20240125-4_j.html
小型月着陸実証機SLIMとは
https://www.jaxa.jp/projects/sas/slim/index_j.html
ライター
大石航樹: 愛媛県生まれ。大学で福岡に移り、大学院ではフランス哲学を学びました。
他に、生物学や歴史学が好きで、本サイトでは主に、動植物や歴史・考古学系の記事を担当しています。
趣味は映画鑑賞で、月に30〜40本観ることも。
編集者
海沼 賢: 以前はKAIN名義で記事投稿をしていましたが、現在はナゾロジーのディレクションを担当。大学では電気電子工学、大学院では知識科学を専攻。科学進歩と共に分断されがちな分野間交流の場、一般の人々が科学知識とふれあう場の創出を目指しています。
