
NASAのジェット推進研究所(JPL)が、新たな地球外生命探査ロボット「EELS(Exobiology Extant Life Surveyorの略)」のコンセプトを発表しました。
このロボットはまるでヘビのような外見で、将来的には土星の第2衛星「エンケラドゥス」の探査を目指しています。
そのため回転式の推進機構によって、エンケドゥラスの氷で覆われた表面や内部海など多様な環境で活動できるよう設計されています。
目次
- 氷の上や砂地、水中を回転して進むヘビ型探査ロボット
氷の上や砂地、水中を回転して進むヘビ型探査ロボット
エンケラドゥスは、いわゆる「土星の月」の1つです。
土星の周りを回っている62個の衛星のうち2番目であり、直径498kmと「地球の周りを回っている月」の7分の1ほどのサイズしかありません。
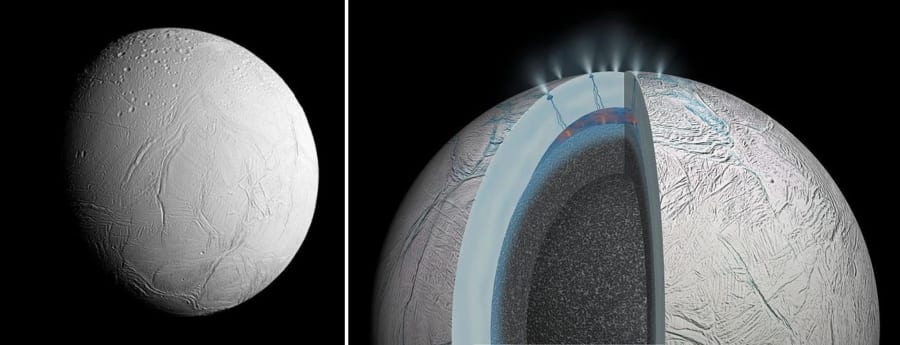
このエンケラドゥスの表面は氷で覆われていますが、その表面のひび割れからは、有機物を含んだ水蒸気や氷が噴出していることが確認されており、分厚い氷の下には海があり、また火山のような熱エネルギーが存在していると考えられています。
そのためエンケラドゥスには生命に必要とされる有機物、熱源、水の3要素が全て揃っており、「地球外生命体が存在するかもしれない衛星」として、大きな注目を集めているのです。
これまでのエンケラドゥスの調査には土星探査機カッシーニが用いられ、上記のような貴重な情報をもたらしましたが、2017年にその運用が終了。

そこでNASAのJPLは、エンケラドゥスを本格的に調査するための新たな探査機を開発中です。
その探査機こそが、今回コンセプトが発表されたヘビ型ロボット「EELS」です。

EELSはその見た目どおりヘビのように自走するロボットであり、作動機構と推進機構、それらを駆動する電子部品のセットを繰り返し繋げた形式となっています。
EELSの大きな特徴は、各セグメントにある回転式の推進機構によって移動できる点にあります。

過去のデモ動画では、氷の上をすべることなく前進しています。
また別タイプのヘビ型ロボットが砂場を移動する様子も投稿されており、回転式の推進機構があらゆる地形に対応できることを示しています。

土星衛星「エンケラドゥス」においてEELSは、氷で覆われた表面をスムーズに移動し、氷のひび割れから内部に進入。内部海にアクセスできると考えられます。
またNASAによると、この回転式の推進機構は水中でスクリューとしても働き、EELSはまるでウミヘビのようにエンケラドゥスの内部海を泳げます。

そして海中では、腹部から卵型の小型探査機を射出する計画もあるようです。
開発チームの最新の報告によると、彼らはカナダのアサバスカ氷河や火山であるミーガー山でEELSを用いたテストを行ったようです。

現在もEELSの開発は続いており、将来的にはエンケラドゥスでの探査が可能になるかもしれません。
地球外生命体の証拠を最初に見つけるのは、このヘビ型ロボットかもしれないのです。
参考文献
Exobiology Extant Life Surveyor (EELS)https://www-robotics.jpl.nasa.gov/how-we-do-it/systems/exobiology-extant-life-surveyor-eels/
NASA’s snake-like robot concept could search for life on Saturn’s moon
https://interestingengineering.com/science/nasas-snake-like-robot-concept-could-search-for-life-on-saturns-moon
