自動運転フォークリフト×自律走行搬送ロボットの連携による荷積み/荷下ろしの自動化を実証実験「社会実装に向けた準備段階へ」
@Press 2023年03月28日 13:00:00
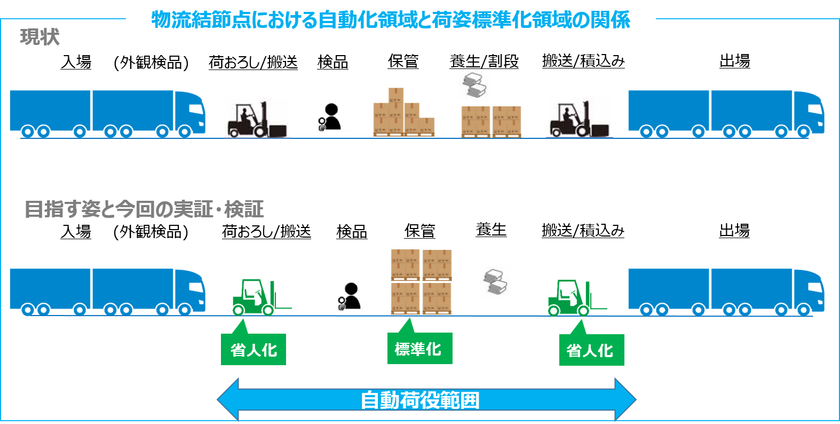
物流結節点における自動化領域と荷姿標準化領域の関係
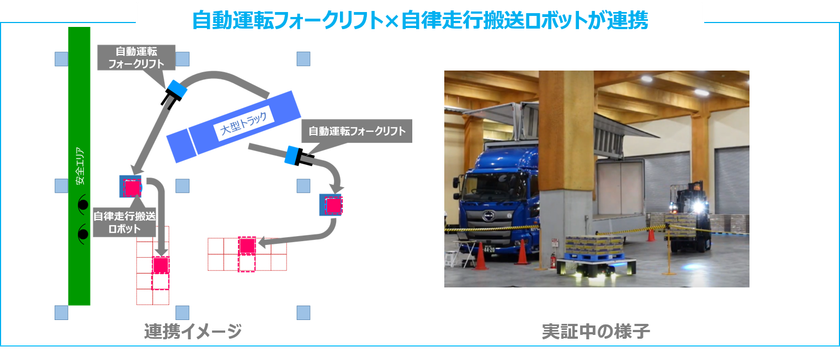
自動運転フォークリフトと自律走行搬送ロボットが連携
※1 CASE(C=Connected(つながる)、A=Autonomous(自動運転)、S=Shared(シェアリング)、E=Electric(電動化))自動車の次世代技術やサービスの新たな潮流を表す
※2 MaaS(Mobility as a Service=IT技術を使って公共交通機関同士をシームレスに連携、人々が便利で効率的に利用できるようにする仕組み)を活用し、物流業界が抱える人手不足や長時間労働等の課題解決を目指す取り組み
※3 荷室内に段差ある・無い各車両に、3種類の異種混載パレットの荷役実施を想定
来たる、2024年問題に起因した「モノが運べなくなる」という社会課題の解決を目指し、NLJが構築する高効率輸送スキームをより幅広い荷主様や物流事業者様と一緒に推進すべく、本実証において得られた成果を活かし、自動荷役技術の実装に向けた取り組みを一層加速してまいります。
■実施概要
●自動運転フォークリフトを使い、NLJの運行を想定した積み付けパターンでのトラックへの荷積み/荷下ろしを実証
●自律走行搬送ロボットを使い、自動運転フォークリフトと連携した荷捌き場での荷積み/荷下ろしを実証
●NLJの取扱荷物実績に基づいた、業界毎における最適な荷姿パターンの検証、および荷姿標準化による効果の測定
画像1: https://www.atpress.ne.jp/releases/350057/LL_img_350057_1.png
{kind=link}
物流結節点における自動化領域と荷姿標準化領域の関係
画像2: https://www.atpress.ne.jp/releases/350057/LL_img_350057_2.png
{kind=link}
自動運転フォークリフトと自律走行搬送ロボットが連携
■実証結果と次の取り組み
●車両情報や荷物情報と連携したシステム環境の構築
自動運転フォークリフト×自律走行搬送ロボットの連携による荷役作業の自動化において、以下3つの実証を行い、実装できる段階であることを確認いたしました。
(1) ダブル連結トラックを含む複数種類の車両での荷役
(2) 車両の両側からの同時荷役
(3) 同一荷室内における異種混載パレットの荷役
今後は、さらに車両情報や荷物情報と連携したシステム環境の構築に取り組んでまいります。
●業界としての荷姿標準化の促進
これまでのNLJの取扱荷物実績に基づき、パレットの種類と高さの要件を解析し、荷姿の標準化に向け、選定した9パターンのパレット活用による効率化の検証を行いました。この9パターンで業界毎の最適パターンを検証した結果、複合積載率※4では最大84.4%の積載効率(業界平均39%※5)を実現し、荷姿標準化による効率性向上の効果を確認いたしました。今後は、業界全体に対し、荷姿の標準化を働きかけてまいります。
※4 (重量使用率+容積使用率)×1/2
※5 国土交通省統計値より弊社試算
■協力会社
株式会社アイシン(自律走行搬送ロボット提供)
株式会社豊田自動織機(自動運転フォークリフト提供)
情報提供元: @Press