芝浦工業大学、「第26回衛星設計コンテスト」へ出場し、アイデア大賞ほか各賞を受賞!~月面探査機や月地中掘削で斬新なアイデアを提案~
@Press 2018年11月15日 15:30:00
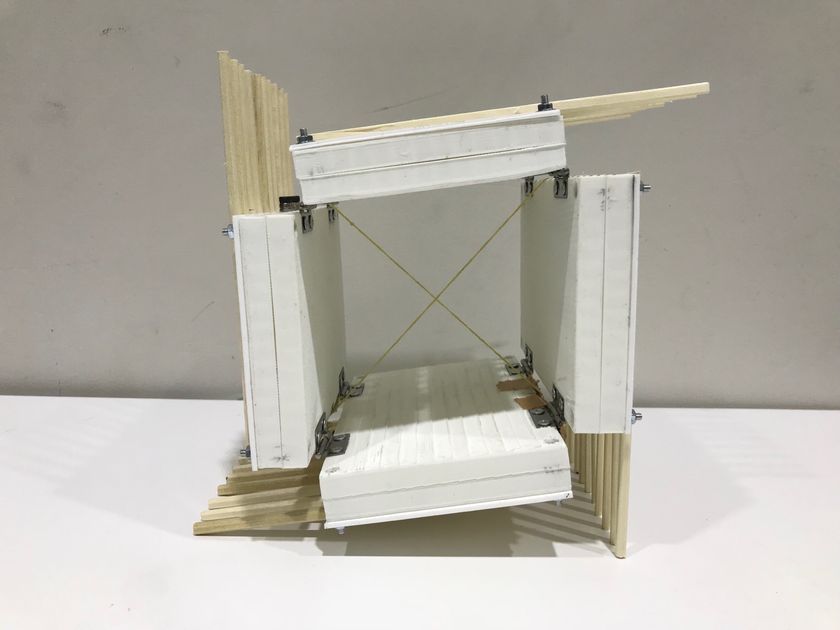
月面探査ローバ「SeW」
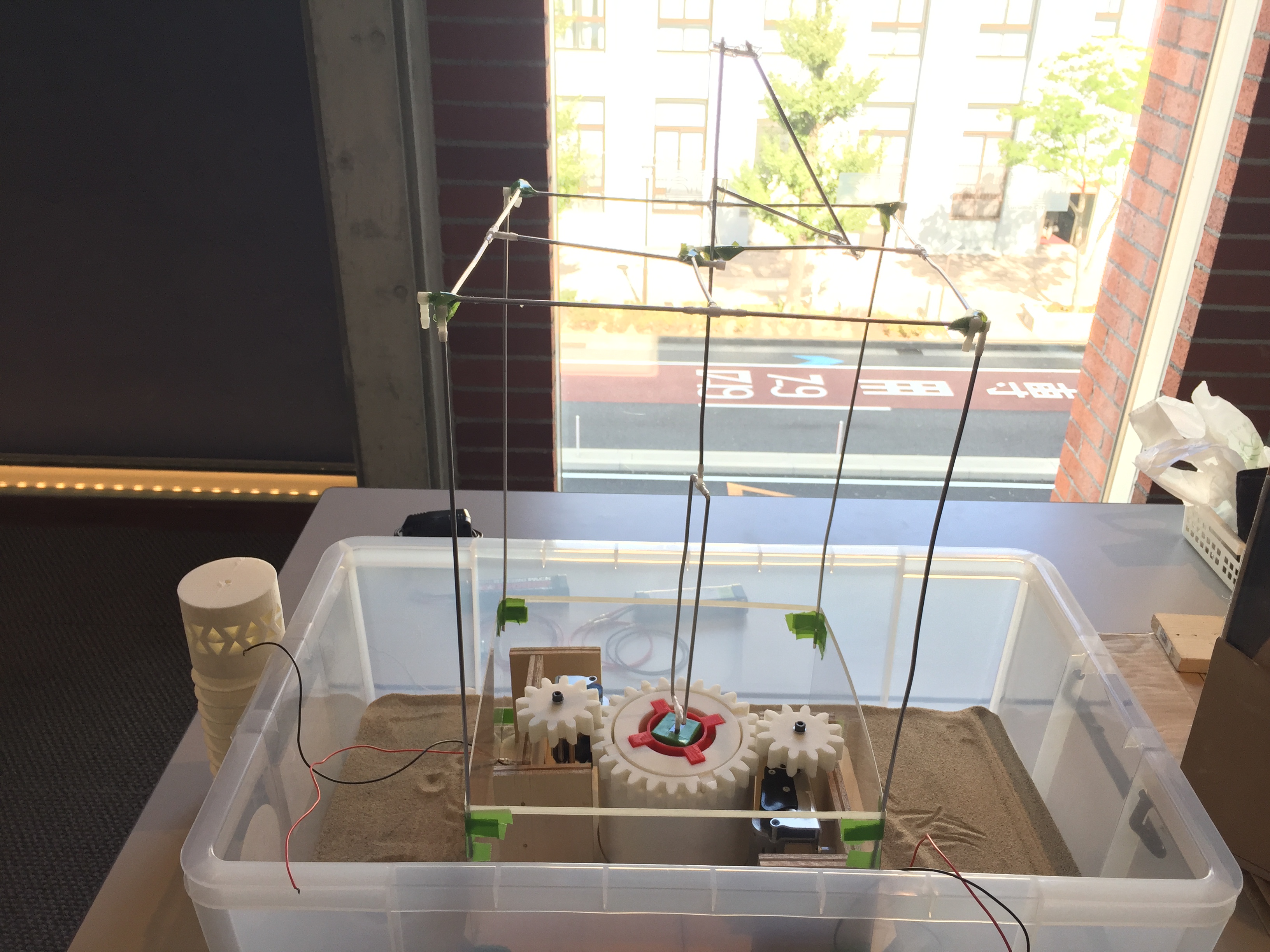
月地中探査機支援システム「TTT」
このコンテストは、小型衛星をはじめとするさまざまな宇宙ミッションを創出し設計を行うもので、今回宇宙ミッションの独創性・有用性を競う「アイデアの部」にて受賞が決定しました。(25チーム中4チームが最終審査に参加)
月面を4つの面から構成されるローバで走行するという新しいアイデアと、月地中部内を掘削して探査を進めるために探査ロボットとは別の機構を開発するという新たなアイデアがそれぞれ評価されました。
画像1: https://www.atpress.ne.jp/releases/170974/LL_img_170974_1.jpg
{kind=link}
月面探査ローバ「SeW」
■月面探査ローバ「SeW」(アイデア大賞/日本機械学会宇宙工学部門一般表彰スペースフロンティア賞/最優秀模型賞)
既存の月面探査機(ローバ)として良く使われる「車輪型」や「クローラ型」は、レゴリス(月を覆う微細な粒子)上でスタックして走行不能になるケースが多いことに着目し、4つの面が回転しながら走行する全く新しい移動機構を提案しました。ローバと接地面の間に静的な力が働き、グラウザと呼ばれる細い突起を付けることで、平地を問題なく走行するほか30度の急な傾斜面を登ることもできます。月面調査の範囲拡大を期待できるアイデアです。
向かい合う面を繋いだ糸を、機体内に内蔵したモータが巻き取ったり緩めたりすることで4つの面が回転しながら進んでいく。グラウザと呼ばれる突起がレゴリスを掻いてスムーズに走行する。
面で移動するという今までに無いアイデア、レゴリスを掻いて移動するためにグラウザを付けた点、少ないモータで走行できる点が高く評価されました。
■月地中探査機支援システム「TTT」(審査委員長特別賞)
月地中部を調査するために、地中部への道を確保するシステムを提案しました。このシステムは、井戸を掘る際に利用される道具「スイコ」からヒントを得た、細長い筒の先端に逆止弁を持つレゴリス掘削機能と、折りたたみ式ポップコーン容器をモデルとした、掘削した穴の崩壊を防ぐための可動式の「壁」を作る機構から構成されています。探査ロボットに掘削機能を搭載する必要がなくなるため、その分調査やその他機能に特化したロボットを地中へ送り込むことが可能になるアイデアです。
筒の外側に右ねじの凸凹をつけてモータで回転、地中に差し込んで筒内にレゴリスを溜める。モータを逆回転させて引き上げ、排出する。同時に、穴の崩壊を防止するための機構もモータで回転させて潜らせる。
https://www.atpress.ne.jp/releases/170974/img_170974_2.jpg
{kind=link}
参加した学生(機械制御システム学科2年生)は、「今回着想を得た機体を実際に宇宙に持って行けるように、方向転換を可能とする機構の搭載や走行を自動化するための制御方法など、今後も改良を重ねたいです」と話しました。
指導を担当した飯塚浩二郎教授(機械制御システム学科)は、「月面に限らず地面掘削の難しさを、実験などを通して理解し、考察しながら改良していた点は本当に素晴らしいと思います。また、良い実験成果がなかなか得られない中でも良いところをうまく構成し大変素晴らしいプレゼンテーションをしていたことも評価が高かった理由だと思います。これから携わる研究・開発へ向けて良い経験をさせることができ、本当に良かったです」と話しました。
情報提供元: @Press