

イメージ図(1)

イメージ図(2)
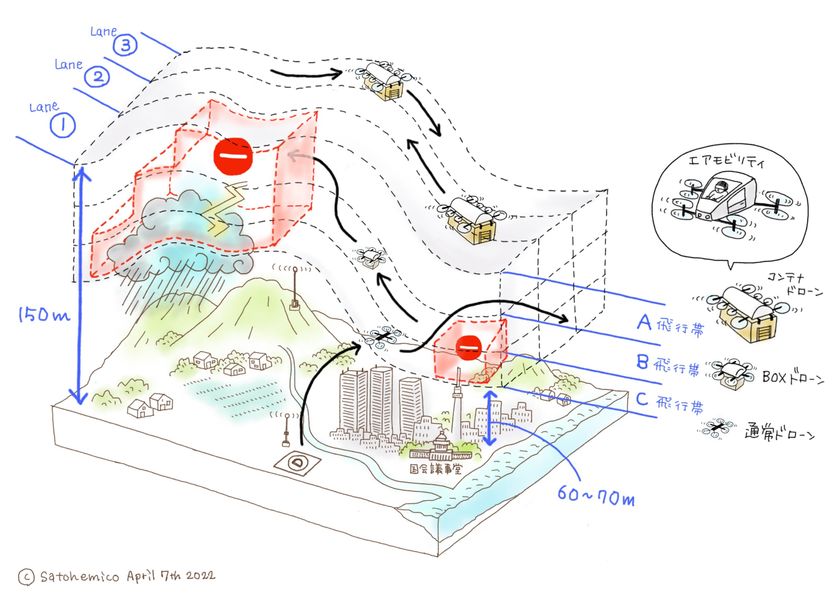
■背景
ドローンの自動運航が普及する社会を想定し、エアモビリティが出発地から目的地までの飛行経路を生成し、他の飛行体との衝突を避けスムーズかつ安全な飛行を実現する誘導技術・管理システムを発明し出願しました。
■特徴
当技術・システム管理の実現により、高速道路のインターチェンジのような滑らかな立体交差を、空路にてリアルタイムに自動的生成することが可能となります。そのことにより、従来のブロックを組み上げるタイプの空路生成システムとは一線を画した、高い安全性と正確性を備えた運航管理システム(UTM)を構築できます。
画像1: https://www.atpress.ne.jp/releases/342552/LL_img_342552_1.jpg
イメージ図(1)
■要約
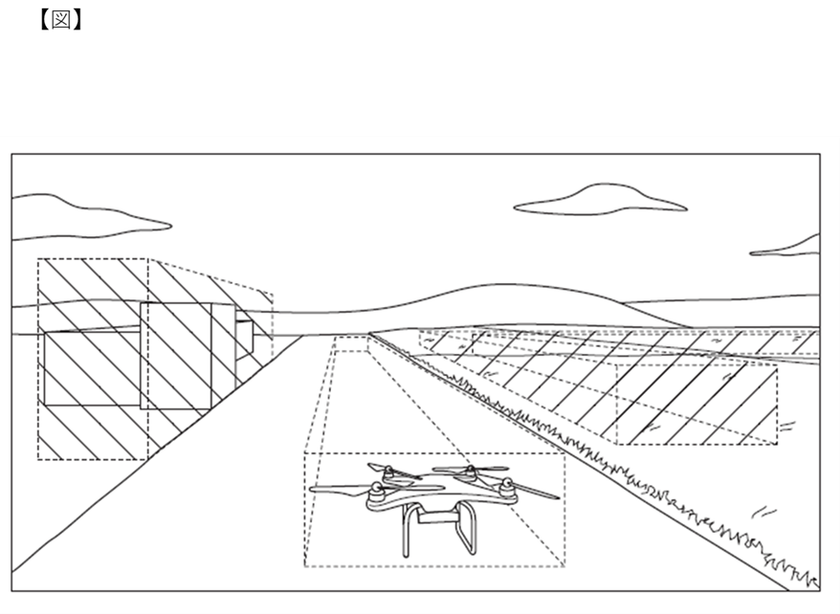
移動体の条件及び移動領域のステータスに応じた移動体の移動経路を生成する。
経路生成装置であって、移動体の移動経路となりうる複数の空間領域で形成される空間領域データと、各空間領域における各タイミングでの移動の可否の判断に利用されるステータスを示すステータスデータと、を記憶し、移動体の出発地及び目的地と、少なくとも移動速度を特定する情報を含む移動体の条件を受け付ける工程と、出発地から目的地までの経路を含む複数の空間領域を当該条件の移動体の移動対象として抽出する工程と、移動対象として抽出された空間領域のステータスを、移動体の移動速度に合わせた各タイミングを考慮して変更する工程と、移動体の制御装置に、各タイミングと関連付けて移動対象の空間領域及び近接する空間領域に関する情報を送信する工程と、を実行する。
画像2: https://www.atpress.ne.jp/releases/342552/LL_img_342552_2.png
イメージ図(2)

{kind=link}
{kind=link}