

イメージ図
■背景
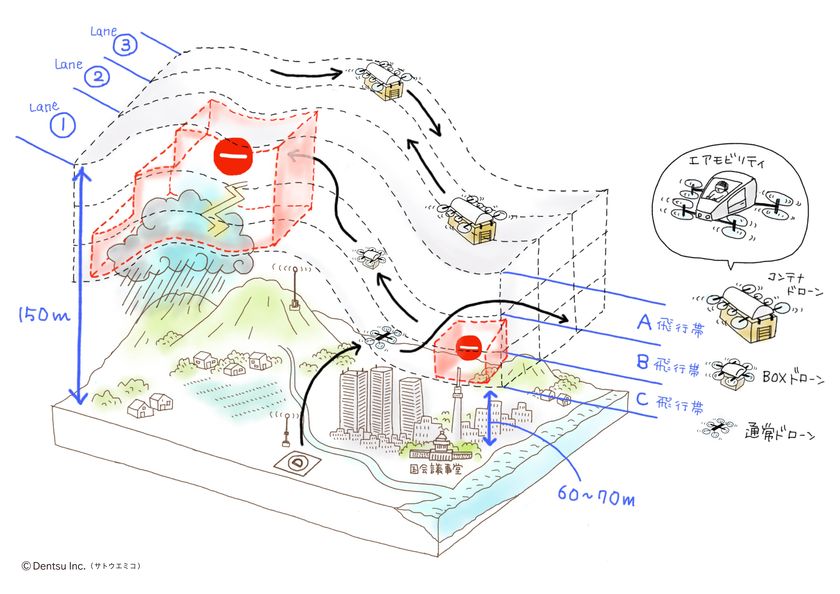
ドローンの自動運航が普及する社会を想定し、エアモビリティが出発地から目的地までの飛行経路を生成し、他の飛行体との衝突を避けスムーズかつ安全な飛行を実現する誘導技術・管理システムを発明し出願しました。
■特徴
当技術・システム管理の実現により、高速道路のインターチェンジのような滑らかな立体交差を、空路にてリアルタイムに自動的生成することが可能となります。そのことにより、従来のブロックを組み上げるタイプの空路生成システムとは一線を画した、高い安全性と正確性を備えた運航管理システム(UTM)を構築できます。
画像1: https://www.atpress.ne.jp/releases/312227/LL_img_312227_1.jpg
イメージ図
■その他の技術的な特徴
・他社UTMと国の定めるAPIを活用した連携が可能
(多数の飛行体を同時に管理し、気象条件や機体性能/飛行形態に応じたルートを自動で設定し、高い衝突/墜落事故回避能力を有する)
・国の定める無人航空機セキュリティガイドラインに準拠

{kind=link}