
CG・アニメ作品では、空を飛ぶロボットが地上へと舞い降り、走行モードにスムーズに変形する場面がよく登場します。
地上から空へ向けてジャンプしながら空中で変形して飛行モードになる演出も定番です。
でも、これって実は現実のロボット工学では“ものすごく難しい”技術なのです。
そんなアニメのような動きを、ついに現実のロボットが可能にしました。
この革新的な技術を開発したのは、アメリカ・カリフォルニア工科大学(Caltech)の研究チームです。
彼らは、空中で形を変えながら地上と空中をスムーズに行き来できる空陸両用ロボット「ATMO」を開発しました。
この研究成果は、2025年4月19日付の『Communications Engineering』誌に掲載されました。
目次
- 空陸両用ロボットの「飛行と走行のギャップ」を埋める挑戦
- 高度な制御アルゴリズムが「停止なしの空と陸の移行」を可能にする
空陸両用ロボットの「飛行と走行のギャップ」を埋める挑戦

これまでも飛行と走行の両方をこなすロボットは存在していました。
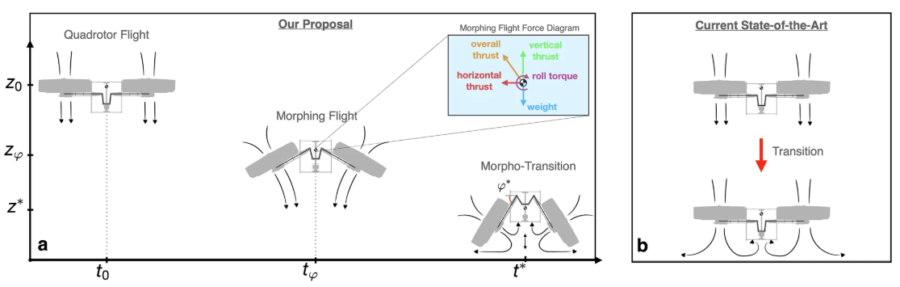
しかしそのほとんどは、「飛行モードから着地して停止した後に変形する」「走行状態から一旦立ち止まって飛行モードに変形する」といったように、変形と移動を別々に行う必要がありました。
なぜなら、空中で機体の形を変えるという行為は、ロボットのバランスを大きく崩しやすく、非常に高度な制御技術と設計が要求されるからです。
飛行中にパーツの角度や位置が変われば、空気抵抗や推進力の方向が変わり、墜落のリスクが飛躍的に高まるのです。
そんな中、Caltechの研究チームは、「変形しながら」走行・飛行のモードを切り替えることができるロボット「ATMO」を開発しました。
ATMOは全長約65センチ、重量約5.5キロのロボットで、4本のアームの先にはそれぞれ「車輪」と「プロペラ」が一体化された“多機能スラスター”が取り付けられています。
飛行モードでは、アームが水平に開いてクアッドコプターとして空を飛ぶことができます。
そして地上に近づくと、プロペラアームの角度を変えながら着地し、車輪として地面を走行することができます。
ATMOは一時停止せずとも「地上→空」「空→地上」とスムーズに領域を変更することが可能なのです。
では、どうしてATMOはバランスを崩さずに、空中で変形しながら、走行と飛行のモードを切り替えることができるのでしょうか?
高度な制御アルゴリズムが「停止なしの空と陸の移行」を可能にする
ATMOが変形しながら走行から飛行へと移行できるのはどうしてでしょうか。
まず研究チームは、ドローンの空気力学に着目しました。
ドローンが地面に近づくと、地面で空気が反射して揚力が増すことがあり、これを「地面効果」と呼びます。
ATMOでは、「変形しながら」離着陸する必要があるので、スラスターが傾いた状態での地面効果を測定し、これを上手に制御しなければいけません。
実験では、スラスターが傾いた状態(40〜60度)で地面に近づくと、推力が最大20%増加することが分かりました。
この効果を上手く利用すれば、スラスターを限界まで傾けた状態でも、安全に着地可能になるのです。
そして実際、ATMOは飛行中に最大65度までアームを傾けながら変形し、そのまま車輪モードで地面に着地。着地と同時に走行を開始することにも成功。
また、地上を走りながら飛行モードに変形し、滑らかに離陸することも可能だと分かりました。
とはいえ、ATMOの「変形しながら」の領域移行を可能にしている最大の鍵は、先進的な制御アルゴリズムにあります。
このアルゴリズムは、変化する機体の形状とスラスターの向き、さらに地面との距離をリアルタイムで考慮しながら、制御目標を柔軟に更新できます。
つまり、ATMOは「今どんな形をしていて、どれだけ推力がズレていて、どう動けば安定できるか」を常に先回りして考えて行動しているのです。
研究チームのMandralis氏は「この制御アルゴリズムこそが論文の最大の技術革新だ」と述べています。
新しい制御アルゴリズムの開発こそが、従来の技術では困難だった“前進と変形の同時進行”を可能にした最大の要因と言えるのです。
私たちがアニメで見てきた「変形しながら空と地上を行き来するロボット」は、このようにして、一歩ずつ実現していっています。
参考文献
Flying robot morphs in mid-air to land and roll on wheels
https://newatlas.com/robotics/atmo-flying-wheeled-morphing-robot/
Mid-Air Transformation Helps Flying, Rolling Robot to Transition Smoothly
https://www.caltech.edu/about/news/mid-air-transformation-helps-flying-rolling-robot-to-transition-smoothly
元論文
ATMO: an aerially transforming morphobot for dynamic ground-aerial transition
https://doi.org/10.1038/s44172-025-00413-6
ライター
矢黒尚人: ロボットやドローンといった未来技術に強い関心あり。材料工学の観点から新しい可能性を探ることが好きです。趣味は筋トレで、日々のトレーニングを通じて心身のバランスを整えています。
編集者
ナゾロジー 編集部
