
私たちが身体測定やスポーツで十分に体感しているように、「ジャンプ」は、動作自体はシンプルであるものの、その記録を伸ばすことは簡単ではありません。
ジャンプは誰もができますが、より高くジャンプすることは難しいのです。
これはロボットでも同様であり、高くジャンプするロボットを生み出すためには、単に大きなエネルギーを発生させるだけでなく、それらを上手く活用できる構造を設計しなければいけません。
最近、イギリスのマンチェスター大学(University of Manchester)に所属するジョン・ロー氏ら研究チームは、シンプルなバネ駆動ジャンピングロボットの設計理論を構築しました。
彼らによると、「将来的に120mの高さまでジャンプできる」とのこと。
これは、自由の女神像を簡単に跳び越えるほどの大ジャンプです。
研究の詳細は、2024年5月21日付の科学誌『Mechanism and Machine Theory』に掲載されました。
目次
- エネルギーを全放出する前に地面を離れてしまう!ジャンプの難しさ
- シンプルだけど自由の女神像を跳び越えるかもしれない!
エネルギーを全放出する前に地面を離れてしまう!ジャンプの難しさ
ほとんどのジャンピングロボットはバネに依存しています。
バネは変形に伴い弾性エネルギーを蓄えるため、これを解放することで、高く跳び上がることができるのです。
この原理を利用したジャンピングロボットは、これまでにたくさん考案されており、これらのロボットには、移動が困難な地形(洞窟、森林、他の惑星など)を探索することなどが期待されています。

しかし、こうしたジャンピングロボットは、「そこまで高く跳べない」ことも少なくありません。
では、どうしてジャンプ専門のロボットが高く跳べないのでしょうか。
それは、バネのエネルギーが完全に解放される前に足が地面から離れてしまうからです。
これはつまり、蓄えられた弾性エネルギーが運動エネルギーに完全に変換されていないということになります。
また逆に、ロボットの離陸のタイミングが遅れてしまっても、高く跳びあがることはできません。
さらに、ジャンプ型のロボットは、設計がさいてkジャンプの軌道が左右に逸れたり回転してしまい、上昇エネルギーを無駄に消費してしまいます。
今回、ジョン・ロー氏ら研究チームは、それらの課題に取り組むことにしました。
彼らはジャンプ機構を分析することで、効率的ではないエネルギー変換が、回転運動やバネの下にある質量にもとづく「慣性の効果」に起因することを発見。
そして、そのマイナスの効果をなるべく無くしたシンプルな設計を生み出すことに成功したのです。
シンプルだけど自由の女神像を跳び越えるかもしれない!
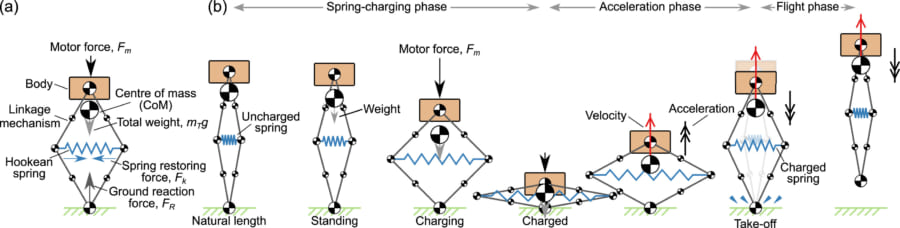
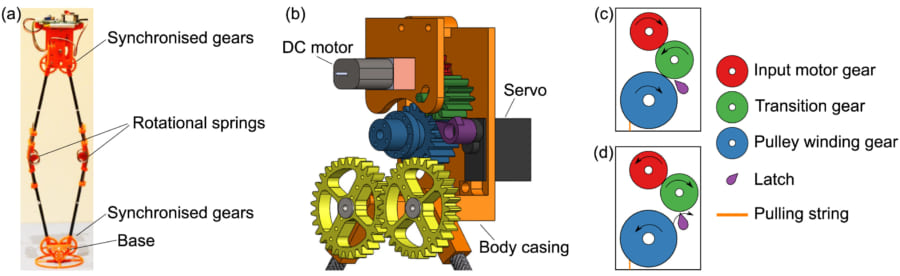
開発されたロボットは、上部が重く、下部が軽くなっています。
そして折り曲がる足の間には地面と平行にバネが装備されています。
足が開くことでバネが伸びて弾性エネルギーが蓄えられます。
そのエネルギーが解放されると、足はまっすぐになろうとし、垂直方向への強い推進力に変わるのです。
研究チームによると、この設計であれば、ロボットの足が地面から離れるタイミングが早くなることも遅くなることもなく、十分な弾性エネルギーを運動エネルギーへと変換できるという。
実際、設計理論を実証するために作られた高さ40cmのロボットは、1.6m以上ジャンプできました。
大して高く跳べていないように思えますが、研究チームによると、「この設計を最適化させれば、将来的に120mの高さまでジャンプできるロボットが開発できる」とのこと。
それはこのロボットが自由の女神像(台座を含めて約93m)を容易に跳び越えられるということです。
もしその未来のジャンプロボットを月面で用いるなら、200mの高さをジャンプできることにもなり、ロケットの打ち上げ機構に取り込むなど宇宙開発の面で活躍が期待されています。
研究者はこうしたロボットの設計の難しさについて次のように語っています。
「ロボットの形状については、考えるべき問題はたくさんあります。例えば、カンガルーのように地面を蹴るための脚があった方がいいのか? それとも巨大なバネを備えた人工ピストンのようなものにすべきか?
ダイヤモンドのように単純な対称形にすべきか、それとももっと曲線的で有機的なものにすべきか?
さらにロボットのサイズはどうするべきか? 小型ロボットは軽くて機敏ですが、大型ロボットはより強力なジャンプのために大きなモーターを搭載できます。なら最良の選択肢はその中間でしょうか?」
ちなみに2022年には、カリフォルニア大学サンタバーバラ校(UCSB)の研究者たちが、バネとモータを利用したジャンピングロボットを開発しており、その時の記録は30mを越えています。
こちらの研究では似たようなメカニズムを利用しつつも、ボールのような変わった形状を採用しています。(以下のリンクから確認できます)
原理はいくらか似ているものの、UCSBの設計したロボットの方が実験では現状はるかに高く跳べています。ロボットの形状をどのように最適化させていくかは、この研究の核となる重要な問題なのです。
今回の研究者らは、性能を大幅に向上させる実用的な設計の1つを発見しましたが、まだジャンプの方向を制御するという課題をクリアできていません。
こうした問題を設計の最適化でクリアできればより高いジャンプを実現できるようになるでしょう。
また研究チームは、1回目のジャンプ後の着地時の運動エネルギーを利用して、ロボットが次のジャンプに向けたエネルギーを充電する方法も検討しています。
これは、宇宙ミッション用にロボットを開発する上でも重要となる部分でしょう。
今後どういったロボットがジャンプの最高記録を塗り替えていくのかは分かりませんが、私たちの想像を超えた驚くべき高さまで飛び上がるロボットが登場するかもしれません。
参考文献
Manchester engineers unlock design for record-breaking robot that could jump over the height of Big Ben
https://www.manchester.ac.uk/discover/news/manchester-engineers-unlock-design-for-record-breaking-robot-that-could-jump-twice-the-height-of-big-ben/
This small robot is the ‘jumpiest’ ever created — it can jump over Big Ben
https://www.zmescience.com/science/robotics/jumping-robot-physics-21062024/
元論文
Characterising the take-off dynamics and energy efficiency in spring-driven jumping robots
https://doi.org/10.1016/j.mechmachtheory.2024.105688
ライター
大倉康弘: 得意なジャンルはテクノロジー系。機械構造・生物構造・社会構造など構造を把握するのが好き。科学的で不思議なおもちゃにも目がない。趣味は読書で、読み始めたら朝になってるタイプ。
編集者
ナゾロジー 編集部
