
広大な海には多種多様な海洋生物が生息していますが、人間のゴミによって汚染されています。
特に、サンゴ礁周辺の生物は水質の変化に敏感なため、深刻な被害を受けています。
そこでドイツのマックスプランク・知能システム研究所(Max Planck Institute for Intelligent Systems)に所属するティアンルー・ワン氏ら研究チームは、海底のゴミを回収できるクラゲロボット「Jellyfish-Bot」を開発しました。
このロボットはエネルギー効率が高く、ほぼ無音で泳げるため、海洋生物を刺激せずに海を浄化できます。
研究の詳細は、2023年4月12日付の科学誌『Science Advances』に掲載されました。
目次
- クラゲのように泳ぎ、海底のゴミを回収する「クラゲロボット」
クラゲのように泳ぎ、海底のゴミを回収する「クラゲロボット」
人間がもたらした大量の廃棄物で海は汚染されており、デリケートな生態系は大きなダメージを受けています。
この問題に対処する1つの方法は、ロボットを用いたゴミの回収です。
ただし、既存の水中ロボットのほとんどは大きく硬いボディのせいでかさばり、作業できる環境に制限があります。
またモーターや油圧ポンプの騒音で周囲の生物に悪影響を与える恐れもあります。
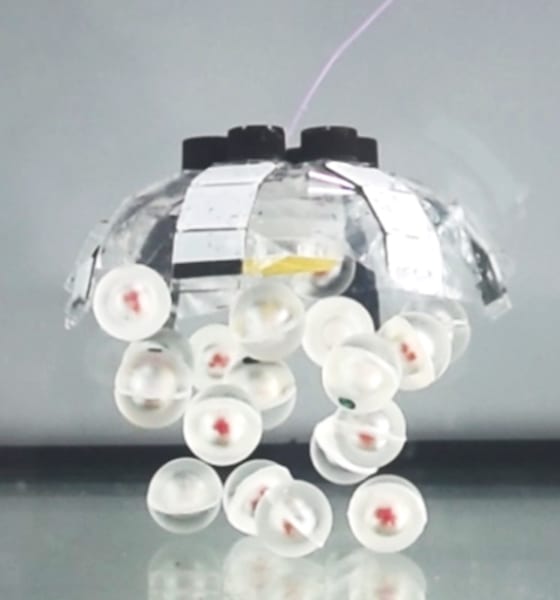
そこでワン氏ら研究チームは、クラゲの動きから着想を得た、クラゲロボット「Jellyfish-Bot」を開発しました。
水中での移動を可能にしているのは、電気で動作する人工筋肉の6本アームのおかげです。

クラゲは傘を開いたり閉じたりすることで小さな渦を発生させ、水中を移動します。
同じくクラゲロボットは、6本のアームの人工筋肉の収縮と膨張によって水流を生み出し、水中を移動できるのです。
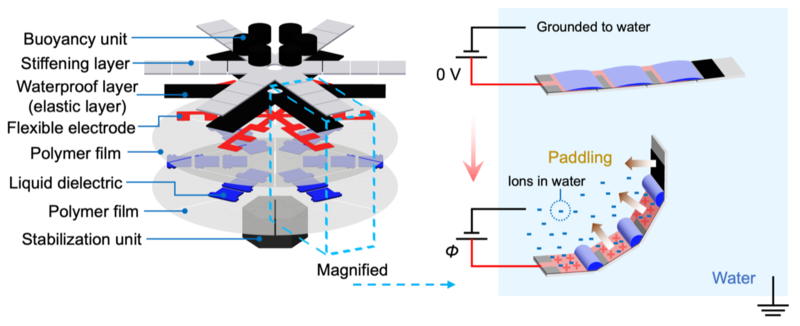
電気で人工筋肉を収縮・膨張させるだけなので、既存の推進システム(モーターとスクリューなど)のような騒音が発生せず、ほぼ無音で泳げます。
しかも特定のアームだけを動かすことが可能なため、これを利用して上昇だけでなく、任意の方向に泳ぐことができます。
また2本のアームで海底のゴミを掴み、他の4本のアームを使って上方に移動することも可能。
実際、海底に沈んだプラスチック廃棄物を掴んで回収することができました。
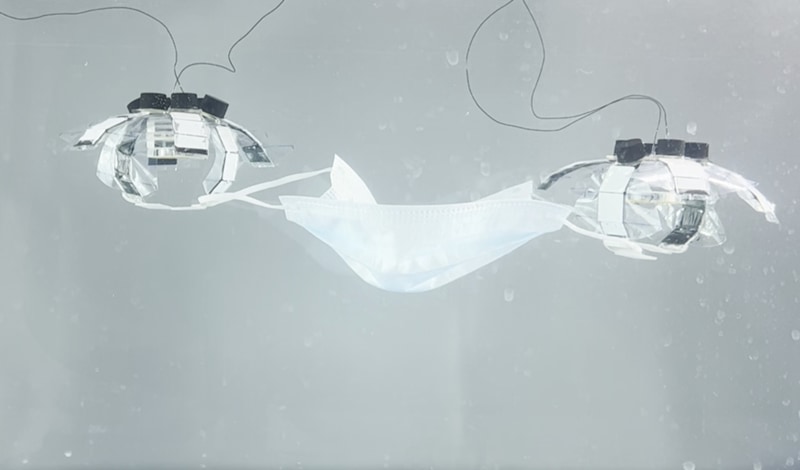
さらに実験では、2体のロボットが協力してゴミを拾うことにも成功しており、研究チームは「協力により重いゴミを運ぶことも可能」だと述べています。
加えて、クラゲロボットは「アームで掴まずに(物理的な接触なしで)」ゴミを回収することもできます。
クラゲは傘の動きで渦を発生させますが、これは泳ぐ動作だけでなくエサを集める動作でもあります。
彼らは発生した水流によって傘の下に食料を集めることができるのです。
同様にクラゲロボットが発生させる渦も、水流によって周囲の物体を集め、傘の下(アームの間)で保持することが可能です。
実際、動画で示されているように、クラゲロボットはこの機能で複数の物体を集めて牽引することに成功しました。
研究チームは、魚の卵などの繊細な生体サンプルを傷つけることなく収集するのに役立つと考えています。
そしてクラゲロボットは、約100mWという低電力で最大6.1cm/sの速度を達成しており、一部の水中ロボットよりも高速かつ効率的に移動できることが分かっています。
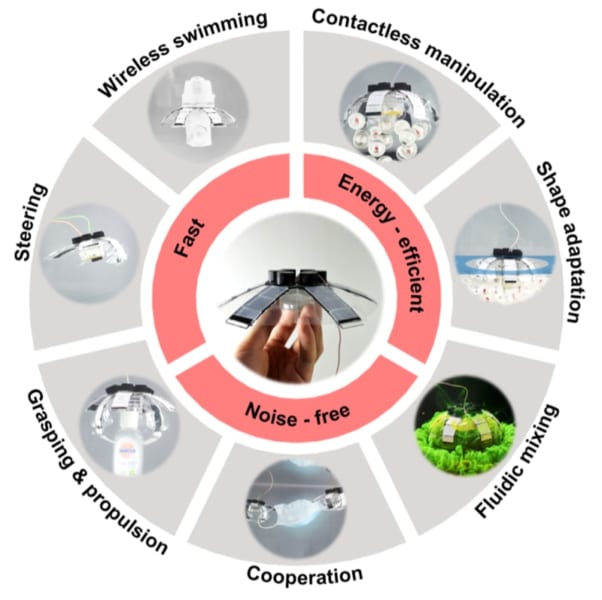
しかもそのボディは薄くて柔らかく、コンパクトな手のひらサイズであるため、かさばらず、複数のクラゲロボットを様々な環境で使用できると考えられます。
将来、無数のクラゲロボットが海に投入され、静かにゴミを回収し、浄化してくれるかもしれません。

ただし、クラゲロボットのプロトタイプはワイヤーで電力供給されており、チームは現在、ワイヤレスタイプのクラゲロボットを開発中です。
それでも無線操作に必要なモジュールは既に内蔵されており、クラゲロボットが自由自在に海を泳ぐのもそう遠くはないでしょう。
参考文献
Jellyfish-like robots could one day clean up the world’s oceanshttps://is.mpg.de/news/quallenahnliche-roboter-konnten-eines-tages-die-weltmeere-saubern
Jellyfish-inspired robot aims to reduce ocean pollution
https://www.zmescience.com/ecology/jellyfish-inspired-robot-aims-to-reduce-ocean-pollution/
元論文
A versatile jellyfish-like robotic platform for effective underwater propulsion and manipulationhttps://www.science.org/doi/10.1126/sciadv.adg0292
