

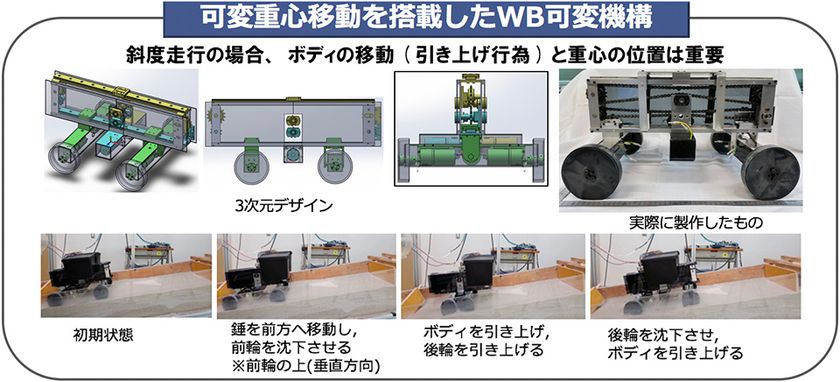
動作の様子

試作機の外観
飯塚准教授は、タイヤにかかる力を解析。その結果、全輪駆動で進めなくなった時は後輪を前輪まで引き寄せ、その後もとの間隔まで戻す動作を加えることで、前進し続けることが可能であることを導き出しました。
この技術は、動作のためにモーターをひとつ増やすだけで実現できるため、コストも安価であるほか、惑星探査機だけでなくレスキュー活動や雪上移動、農業にも応用が可能なため、今後企業などとの共同研究により、実用化を目指します。
■ポイント
(1) 車輪軸間距離(ホイールベース)を動かすことで、軟弱地盤でも足を取られず前進し続けられるようになった
(2) 故障リスクの少ない車輪という機構に、モーターを1つ増やすだけで良いため低コストである
(3) 惑星探査機だけでなく、レスキュー活動や雪上移動、農業など民生用での利用も想定できる
画像1: https://www.atpress.ne.jp/releases/143934/LL_img_143934_1.jpg
動作の様子
■背景
粒子が非常に細かい軟弱地盤を移動するのは大変難しく、通常のタイヤでは徐々に沈下しながら走行悪化を招き、その場から前進のみならず後進もできなくなる問題がありました。飯塚准教授は、月・惑星探査ロボットの研究でタイヤがどのように沈下していくのか実験を重ね、タイヤにかかる力の変化を解析しました。その結果、沈下現象を起こしているタイヤが前後から受けている力は非常に強く、逆にその力を利用することで前進し続ける、新たな走行方法を発見しました。
■今回の成果
タイヤ沈下時に得られる支持力(前後にタイヤを動けなくする力)と、車輪軸間距離(ホイールベース)の伸縮を融合させることで、尺取虫のような動き方で前進し続けることが可能となりました。前輪が砂に埋まった際、前に進まないだけでなく後ろにも進まない力が前輪に働きます。この状態でホイールベースを縮め後輪を前に動かすと、後輪を引っ張る力より前輪が固定される力の方が強く、前後輪を密着させることができます。その後、前輪を後輪から離すよう動かすと、さっきまで埋まって動かなかった前輪がスムーズに前へ進み、前進し続けられるようになりました。加えて、沈下させたいタイヤの方へおもりを動かす機構を追加することで、さらにスムーズな動作が実現できました。
この移動方法は、モーター(アクチュエータ)が一つ増えるだけで実現でき、今まで走行悪化を招いていた原因・現象を利点に変え、高い走行性能を実現します。
■今後の展開
実験機により、タイヤの間隔を動かすことで前進し続けられることが実証できました。今後は、走行評価やタイヤに起こっている状況の詳細な解析を行い、原理の解明や技術の実用化を目指します。
■動画はこちら https://www.youtube.com/watch?v=Q_RICeKWbLk

{kind=link}