地盤に振動を与えスリップをコントロールする移動手法を開発 ~被災地など軟弱地盤における車両移動が容易に~
@Press 2019年07月29日 14:00:00
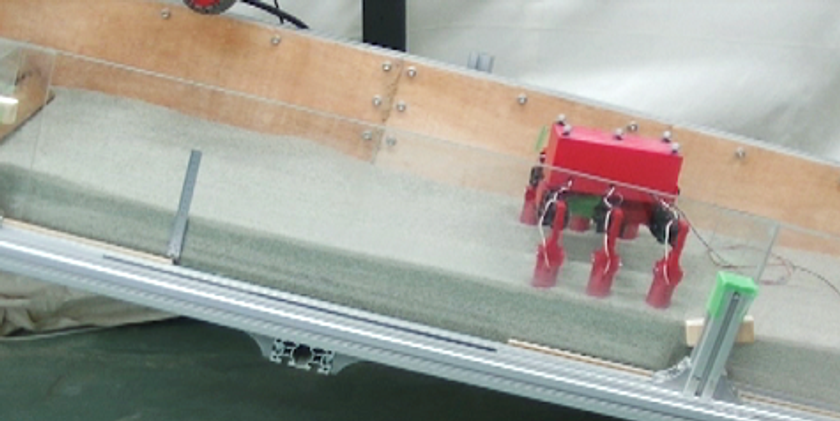
後退してしまう15°の斜面でも、振動・停止を繰り返すと 前進が可能(振動多脚ロボットの歩行実験の様子)
「せん断破壊」を防止する本手法の原理
この方法を応用し、土砂災害や津波によって泥が流れ込んだ場所でも、滑ったり埋まったりせずに活動できる被災地現場での作業車両や、スリップの有無をコントロールできる農業ロボットなどへ展開できます。
画像1: https://www.atpress.ne.jp/releases/189678/LL_img_189678_1.png
{kind=link}
後退してしまう15°の斜面でも、振動・停止を繰り返すと 前進が可能(振動多脚ロボットの歩行実験の様子)
■ポイント
・地面に振動を与えると、粒子の密度が上昇して地盤が固くなり移動が容易に
・軟弱地盤でも、任意にスリップの有無をコントロールした移動が可能
ロボットの歩行する様子のビデオはこちら
https://youtu.be/9I2GzYboBiA
<困難な軟弱地盤の移動>
軟らかい地盤では上から力がかかると、地面に対して平行にずれるように力がかかる「せん断」と呼ばれる現象が起きやすく、滑ったり埋まったりします。被災地や農地など砂や泥で覆われた軟弱地盤では、この現象のためにスリップが起こりやすく、車両での移動・走行の困難さが課題です。
<地盤の粒子密度を上昇させ、滑らずに移動>
飯塚教授は、地盤に振動を与えると地盤の粒子の密度が高まりせん断破壊を防止、移動しやすくなることを発見しました。
車両やロボットなどの移動体に振動デバイスを組み合わせてこの手法を展開することで、移動が難しい軟弱地盤であってもスリップをコントロールした高い移動性能を実現し多様な作業構成が可能になります。
<今後の応用・展開>
被災地でのレスキュー活動用ロボット、水田除草用の農作業ロボット、除雪作業や山岳レスキューを行う雪上移動ロボット、危険な地域でも地盤特性が測定できる土壌検査ロボット、さらには次世代の月・惑星探査ロボットなど、軟弱地盤の移動を課題とする作業に従事する多様なロボットへ展開が可能です。
情報提供元: @Press