

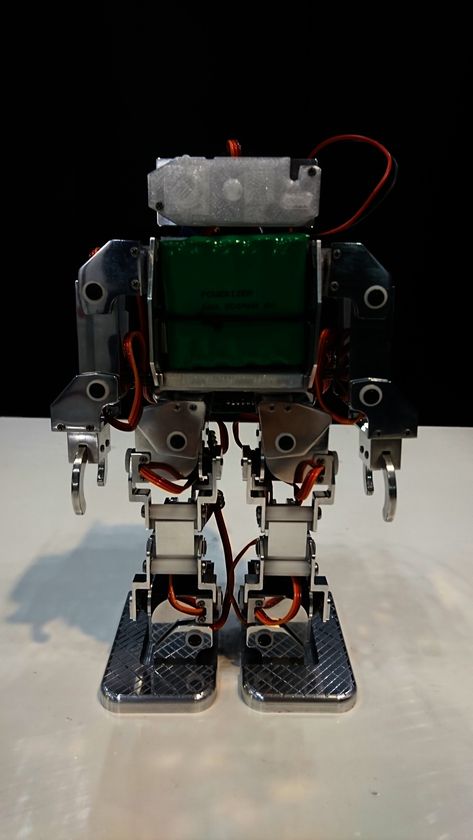
UTRX-17 正面

UTRX-17 右側面

UTRX-17 左側面

UTRX-17 背面
基本アーキテクチャーとして、OpenEL(R)(Open Embedded Library)を採用した世界初のロボットです。
OpenEL(R)は、一般社団法人組込みシステム技術協会が2011年から調査・研究・開発を開始し、現在、ソフトウェアの標準化団体である米Object Management Group(OMG)や国際標準化機構(ISO)において国際標準化を進めているロボット向けのハードウェア抽象化レイヤーです。OpenEL(R)のAPI(Application Programming Interface)を用いてロボットを構成するモーターやセンサーなどのデバイスを抽象化して制御することができるため、カスタマイズなどでロボットを構成するデバイスを変更・交換しても、ソフトウェアの書き換えが不要となります。これは、ソフトウェアの再利用性、生産性、品質の向上につながり、多様な用途に対応することが可能です。
アップウィンドテクノロジーは、今後もOpenEL(R)を基本アーキテクチャーとして用いながら、プラットフォームロボットを構築する基礎・応用技術の研究開発を進めてまいります。
なお、UTRX-17を11月15日から17日までの3日間、パシフィコ横浜において開催される「Embedded Technology 2017」に出展いたします。
画像1: https://www.atpress.ne.jp/releases/143245/LL_img_143245_1.jpg
UTRX-17 正面
■UTRX-17の主な特徴
<ハードウェア>
・日本が世界に誇る高品質な金属加工技術を採用(Made in Japan)
・カメラを搭載し、人の動作を擬似した動きが可能(遠隔操作による自立二足歩行を実現)
・高いメンテナンス性(主要部品は容易に分解でき、機能追加や改造が可能な構造を実現)
<ソフトウェア>
・次世代のロボット開発プラットフォームOpenEL(R) 3.0 を採用
・ソフトウェア標準化団体のOMGが策定中の国際標準 HAL4RT 2.0 に準拠
・ISO/TC299/WG6が策定中の国際規格 ISO 22166-1 に準拠(予定)
<提案する用途>
・ロボット技術やロボットを活用するサービスの研究
・人とのインタラクションやUXデザインの研究
・オフィス、ホテル、病院、商店などの受付
・コンビニなどでの顧客サービス
・AIやクラウドと連携したサービス
・エンターテインメント
・監視、警備
・教育、ロボットプログラミング教室
・その他
<主な仕様>
・全長 :250mm以下(突起物を含まず)
・重量 :820g以下(バッテリー装着状態)
・動作音:30cm離れた場所で80db以下
・関節数:15
■OpenEL(R)について
OpenEL(R)は主にロボットや制御システムを対象とし、モーター制御やセンサー等のデバイスの入出力に特化した標準API(Application Programming Interface)仕様を定義しています。OpenEL(R)というハードウェア抽象化レイヤーを設けることによって、初心者では難しかったモーター制御が、OpenEL(R)のAPIを利用することにより誰でも簡単に出来るようになり、ソフトウェアの開発後にデバイスが変更されてもソフトウェアの変更は不要となることを実現しています。
OpenEL(R)は、一般社団法人組込みシステム技術協会の日本における登録商標です。
UTOSは、Upwind Technology, Inc.の日本および米国における登録商標です。Upwind Technology、GNUWing は Upwind Technology, Inc. の商標です。その他のすべての名称は、各社の商標、登録商標またはサービスマークです。

{kind=link}